![]()
Entre las diversas líneas de investigación en Ingeniería Informática que apoya el Instituto Universitario de Investigación en Ingeniería Informática de la Universidad de Sevilla (I3US), cabe destacar aquellas relacionadas con la Robótica, la Inteligencia Artificial y la Automatización. Con el fin de fomentar y apoyar la investigación en estas líneas, el I3US dispone de material e infraestructuras de robótica que pone al servicio de sus investigadores. Asimismo, la siguiente página en Github contiene repositorios de software libre creados y mantenidos por miembros del I3US para promover la colaboración y facilitar el uso compartido del material.
En esta página se detalla el material disponible.
Dicho material ha sido adquirido con fondos FEDER Convocatoria Adquisición Equipamiento Científico-Técnico Infraestructuras: FEDER / Ministerio de Ciencia e Innovación y Universidades - Agencia Estatal de Investigación EQC2019 - 6325.
RS-Lidar-16

Sensor LiDAR con campo de visión de 360 grados (horizontal) y 30 grados (vertical), 150 metros de alcance y precisión de 2cm. Las aplicaciones principales del RS-LiDAR-16 son la conducción autónoma, la percepción del entorno de robots y el mapeo de UAV.
Plataforma TurtleBot II
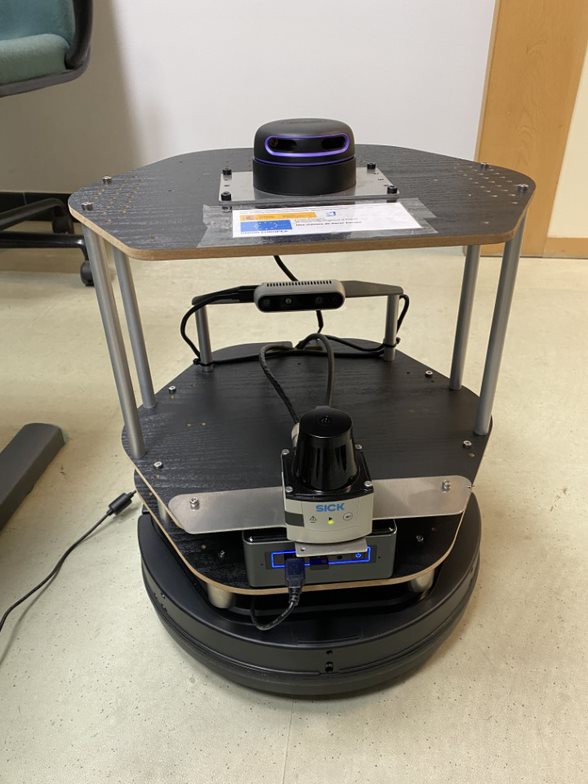
La plataforma TurtleBot II es una plataforma de bajo coste para la experimentación en robótica móvil. El I3US dispone de seis kits TurtleBot II. En este repositorio se puede encontrar un paquete de ROS conteniendo todos los drivers, dependencias e instrucciones necesarias para la puesta en servicio de los TurtleBot adquiridos por el I3US.
Cada uno de los seis kits cuenta con los siguientes componentes:
Base Kobuki
Kobuki es una base móvil de bajo coste diseñada para la educación y la investigación en robótica. Las baterias a bordo proporcionan alimentación para un ordenador externo, así como para sensores y actuadores adicionales. La odometría de alta precisión, asistida por un giroscopio calibrado en fábrica, permite una navegación precisa.
Lidar 2D Sick TIM551-205001
Sensor LiDAR 2D con un campo de visión de 270 grados horizontal, 8 metros de alcance y resolución angular de 1 grado. Conexión Ethernet.
Lidar 2D RPLIDAR A3
Sensor LiDAR 2D con un campo de visión de 360 grados horizontal, 25 metros de alcance y resolución angular de 0.225 grados. Conexión USB.
Intel RealSense Depth Camera D435
Cámara de profundidad estereoscópica con aplicaciones en la robótica, realidad aumentada y virtual. Alcance de 10 metros. Conexión USB.
NUC i5, 8Gb RAM, 1Tb HD
La CPU a bordo del TurtleBot es un Intel NUC i5 con 8 Gb de RAM y 1 Tb de disco duro con conexión Wi-Fi y Ethernet, puertos USB 2.0 y 3.0, y salida HDMI.
Nvidia Jetson AGX Xavier Developer Kit 32 GB
Sección en desarrollo
El kit Nvidia Jetson AGX Xavier permite manejar algoritmos de odometría visual, fusión de sensores, localización y cartografía digital, detección de obstáculos y planificación de rutas para robots de nueva generación. Cuenta con un rendimiento GPU de 32 TeraOPS (TOPS) de cálculo máximo y 750 Gbps de E/S de alta velocidad en un formato reducido de 100x87 mm.
Monitor, teclado y ratón
Para facilitar el desarrollo de software y la preparación de experimentos, cada kit TurtleBot del I3US viene acompañado por un monitor, un teclado y un ratón, para que el usuario se pueda conectar con comodidad a la CPU a bordo o al kit Nvidia Jetson Xavier.
Plataforma XL-GEN
Sección en desarrollo